研究の背景・目的
我が国を含む超成熟社会において、豊かさの指標は「モノの量」から「生活の質」への転換期を迎えつつあり、各個人に対応した人手や手間暇のかかる身体的行為を人工的に実現しない限り社会全体が立ち行かなく恐れがある。身体的行為の人工実現には力触覚のある柔らかな動作が必要不可欠であるが、従来のロボット技術においては「理想力源」と「運動機能を表す一般化座標変換」が抜け落ちているために硬い運動しか実現されない。
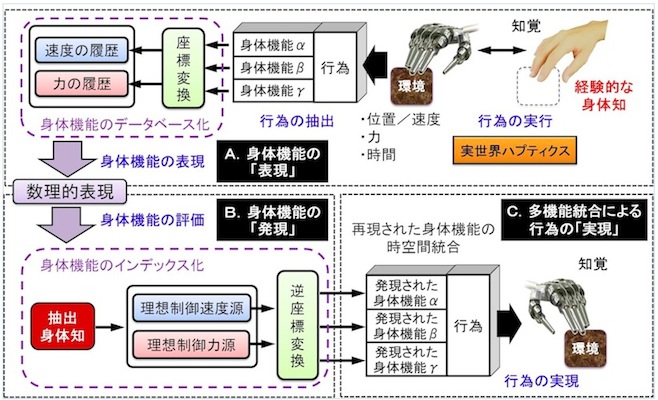
本研究では、運動双対性の原理に基づき、ハプティクス機能のあるエンドエフェクタHEM2(Haptic End-effector for Medicine & Manufacturing)を実現し、身体的支援を可能にする。HEM2は従来の機械では欠落していた「柔らかい」運動を実現するばかりでなく、人間の持つ様々な動きのスキルを抽出、記録、再現する能力を有するため医工融合基盤の鍵技術となる。これにより医療福祉分野と産業分野に共通する身体機能の高度化、自動化、遠隔化が可能になり、超成熟社会の持続的発展に大きく貢献する。
研究方法および概要
期待される成果と意義
力触覚技術による身体機能の設計原理を飛躍的に発展させることで、人の直接的運動行為と身体機能との関係を理工学的に明らかにしようとする点に特色がある。また本研究課題によって、身体機能を制御エネルギー源と機能トポロジーとの統合として初めて数理的に扱うことが可能となるため、その学術的な意義および独創性は極めて高い。 本研究課題の成果として確立する身体機能に基づく行為支援方法論を体系化すれば、医療や介護などで典型的にみられる人手に依存してきた手間暇のかかる肌理細やかな作業(手術やリハビリなど)に対する理工学的支援や、勘や経験に代表される暗黙知の明示化への道筋が示され、新たな産業価値の創出が期待される。また、本技術は原理から応用まですべて我が国において育成してきた純国産の学問分野であり、世界に貢献する独創的技術である。
 —
—
 —
—