医療ロボット
大西研究室では消化器外科,小児外科,口腔外科,リハビリテーションの先生方と共に,様々な分野で医療に関する共同研究をおこなっています。 以下はその一例です。
低侵襲性内視鏡手術ロボット
低侵襲手術における正確さと柔軟性の向上のためには触覚が必要不可欠である。
大西研究室では内視鏡手術を想定し,物体に触れた際の感覚を鮮明に伝達できるハプティック鉗子の開発に成功した。
以下に内視鏡手術ロボットの特徴をまとめる。
・鮮明な触覚の伝達は厳密な実時間システムと加速度に基づくバイラテラル制御(Acceleration-based Bilateral Control : ABC) によって実現可能である。また,マスタ・スレーブ間において感覚の増幅が可能である。
・現在,実世界ハプティクスは低侵襲手術(Minimally Invasive Surgery : MIS)を中心として実用化に向かっている。
・ハプティクスは環境の認識,柔軟な動作や技能の保存などを可能にし,様々な分野において無限の可能性を秘めている。
・遅延を補償することで,遠隔手術や遠隔治療といった様々な遠隔操作の用途においても,ハプティクスを応用することができる。


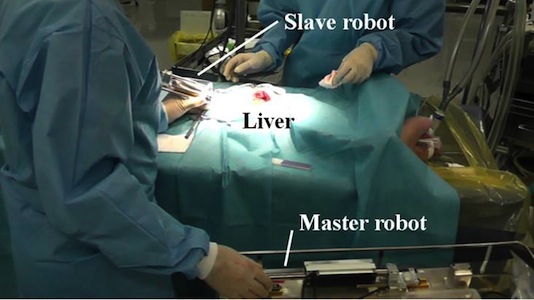
Master and Slave Robot


Experiment of Master and Slave Robot
肝生検システム
近日公開
Animal Experiment
インプラント手術支援システム
欠損歯を修復する治療法としてインプラント治療が注目されている。インプラントは従来の義歯やブリッジ等の方法に比べて欠損前の状態に近い噛み合わせを実現することができる。 しかし,インプラントドリル切削では接触点が不可視であるため,医師は微妙な力加減を頼りに手術をおこなう必要があり,高度な技術と経験が要求される。経験不足な医師による執刀では顎骨のランドマークを傷つける危険性がある。 リアルタイム手術支援技術の開発はこのような医療事故を未然に防止するために有効である。術中の医療事故を防止するための重要な情報として,定量的な切削中の骨密度および切削深度があげられる。 本研究ではバイラテラル制御に基づくロボットドリル切削システムを用いて,切削力のモデル化,骨密度のパラメータ同定により切削中の骨密度と切削深度をリアルタイムに提示する。
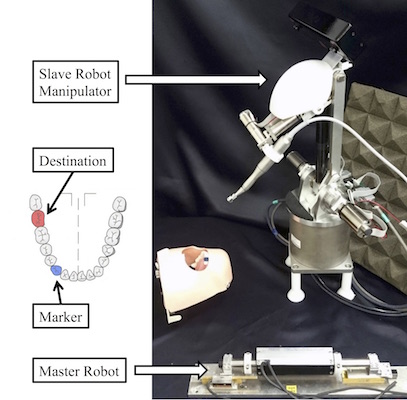
Robotic drilling system
 —
—
 —
—