多自由度ロボット
腱駆動型指ロボット
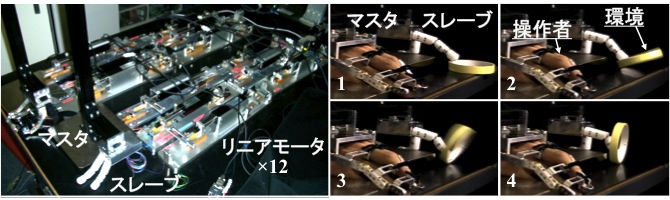
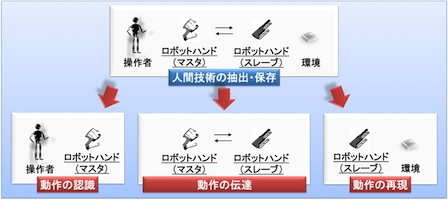
高度熟練技術の抽出・保存・認識・再現を目的とした腱駆動ロボットハンドの研究に取り組んでいる。本研究の目的は、人間の身体行為を人工的に実現することである。身体に装着可能なマスタ・スレーブ型ロボットに対してバイラテラル制御を実装することで、身体行為に関する情報を抽出したのち、これらの情報をスレーブロボットに与えることで行為の人工実現に取り組んでいる。ナットの緩締行為を対象とした実機実験により提案手法の有用性確認を行っている。
Robot Hand
Recoding and Representing of Human Action
腱駆動型球体関節機構
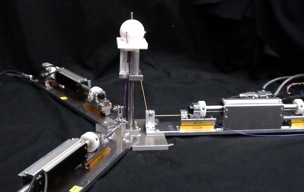
力覚伝達機能を有するマスタ・スレーブ型ロボットによる手術や介護、人間にとって危険な領域の探索が期待されている。スレーブロボットにはたらく力覚をマスタロボットの操作者に伝えることで、対象や状況に合わせた接触や動作を実現できる。力覚伝達は4chバイラテラル制御により実現される。実用化のためには多自由度ロボットが必要だが、鮮明な力覚伝達のためには低慣性かつ多自由度な機構が必要となる。そのため、腱駆動型球体関節機構を開発し、本機構の糸のたるみを抑制する張力制御手法および力覚伝達に必要な4chバイラテラル制御手法を提案した。現在、本機構を有する多自由度ロボットの開発及び制御手法について研究を行っている。
Tendon-driven Spherical Joint Mechanism
 —
—
 —
—