ヒューマノイドロボット
ヒューマノイドロボット実現に向けて、その基礎となる歩行動作の研究を行っています。国内外の研究機関が実用化に向け研究に鎬を削る、大変競争の激しい分野ですが、それだけやりがいのある研究です。具体的には、一般的に歩行ロボットに採用されているシリアルリンク型ロボットだけでなく、本研究室では独自開発したパラレルリンク型や、走行動作の基礎となるホッピング動作などの研究も行っています。
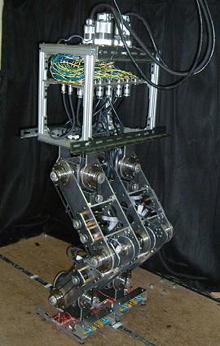
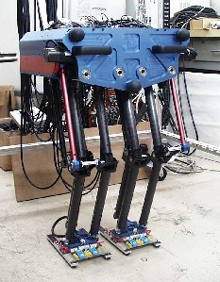
シリアルリンク型歩行ロボット(左) パラレルリンク型歩行ロボット(右)
大西研究室オリジナルのパラレルリンク型ロボットは、モータを腰部に集めることで、脚の軽量化を実現しています。このため、より少ないエネルギーでの歩行や、障害物との接触時の衝撃を抑えることが可能となり、人間や延いては環境に優しいロボットです。
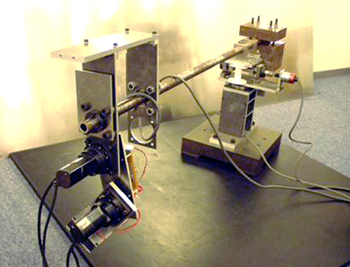
ホッピングロボット
徴的なロボットの一つです。自然界には跳躍を取り入れている生物は多く、跳躍をロボットに応用することで、より広範囲かつ迅速な障害物回避などに活用される見込みです。
 —
—
 —
—