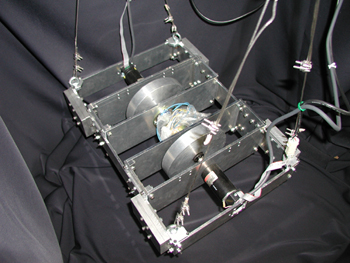
Flywheel
Utilizing reaction torque generated by acceleration of wheels, the posture of a flying object is controlled. This robot has huge availabilities including the posture control of satellites and a battery, which stores energy in a form of wheel revolving energy.
Generally, flywheels are known to have some weaknesses such as small output torque. Ohnishi laboratory tackles this problem by introducing a powder braking system.
Flywheel
 —
—
 —
—