制御手法
ミクロマクロバイラテラル制御
圧電アクチュエータを用いたミクロマクロバイラテラル制御の研究をおこなっています。圧電アクチュエータ(図の緑色の板状のもの)は、電圧によって 駆動するアクチュエータで空間分解能が非常に高いという長所があります。この圧電アクチュエータとミクロマクロバイラテラル制御を組み合わせることにより、マイクロ〜ナノスケールの物体を思いのままに操れるようにすることが私の研究の目的です。現在では位置の倍率が4万倍にも達しました。つまり理論上、わずか10nmの極小物体をあたかも40cmの大きな物体のように操れるということです。まだまだ発展途上ですが興味のある方は研究室へお越しください。
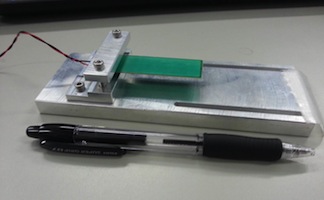
piezoelectric actuator
ネットワークベース制御
ロボットを遠隔操作する場合、お互いの情報はネットワークを通じて伝達が行われます。しかし、ネットワークには、通信遅延、ジッタ、パケットロス、パケット逆転、輻輳といった通信特有の問題が存在し、これらはときに制御系の安定性・性能を劣化させる原因となります。たとえば、制御の世界では、100分の1秒程度の通信遅延がロボットの暴走を引き起こす致命的な要因となりえます。そのため,このようなネットワーク特有の問題が制御系に与える影響を調査し、制御の立場から解決方法を探すことが必要となります。
 —
—
 —
—