バイラテラルロボット
原子炉や宇宙、手術用途に活用される見込みの遠隔操作の基礎研究、および遠隔操作ロボットの開発を行っています。将来は、遠隔地の手術や、人間の手では直接操作できないような微細作業に適用される見込みです。
例えば、手術ロボットの基礎となる遠隔鉗子ロボットの研究にも近年着手し、より操作者が遠隔地の環境を正確に感じ取れるような制御則を導くことに成功しています。実際に、インターネットで日本と欧州間を結び、長距離の遠隔ロボット操作の実験も行いました。
多自由度鉗子ロボット
また、鉗子ロボットで培った制御則を他の機構のロボットにも適用することにより、様々な操作を遠隔で実現できるよう研究を進めています。例えば、バイラテラルXYテーブルでは、「擦る」「切断する」といった、二次元的な触覚を扱うことができるようになりました。

バイラテラルXYテーブル
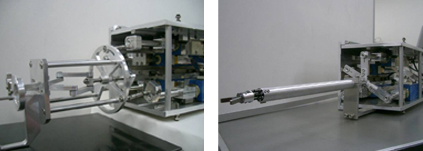
また、テレハンドはスラストワイヤを用いることで従来まで一自由度(一方向のみに可動)だったロボットを多自由度に拡張したバイラテラルロボットです。多自由度に拡張されたことで人間の手の動きを実現し、人間にとって非常に重要な触感の一つ、『手で物をつかんだ』時の感覚を伝達することを可能としました。今後はさらに自由度を拡張するだけでなく、肩を含めた人間の腕全体の動きを実現するバイラテラルロボットを開発していく予定です。

テレハンド
スラストワイヤは、リニアモータ(直線方向に動くモータ)からの駆動力をロボットの実際の可動部分であるエンドエフェクタの先端に伝える役目を果たします。よって、従来はエンドエフェクタに隣接させなければいけなかったモータをエンドエフェクタから離れた位置にフレキシブルに配置することを可能にしました。
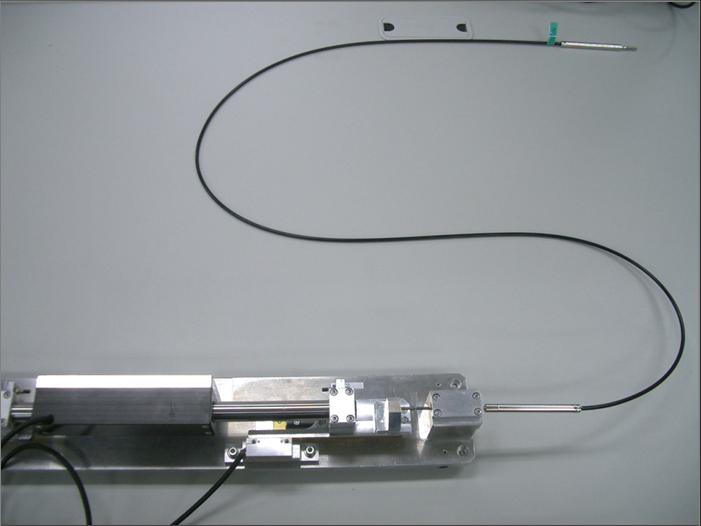
スラストワイヤ
内視鏡手術という難しい手術をアシストするために、内視鏡手術で使われる鉗子という器具をロボット化しました。医師はマスタロボットを操作し、スレーブロボットが実際に患部の手術を行います。このロボットには、力覚と呼ばれる硬い、軟らかいといった感覚を遠くに伝達するという高度な技術を応用しています。 またこのロボットを制御するために、FPGAというデバイスを実装した特別なボードを開発しました。これらの技術により内視鏡手術の難易度が下がり、より安全で短時間に手術が行われることが期待されます。
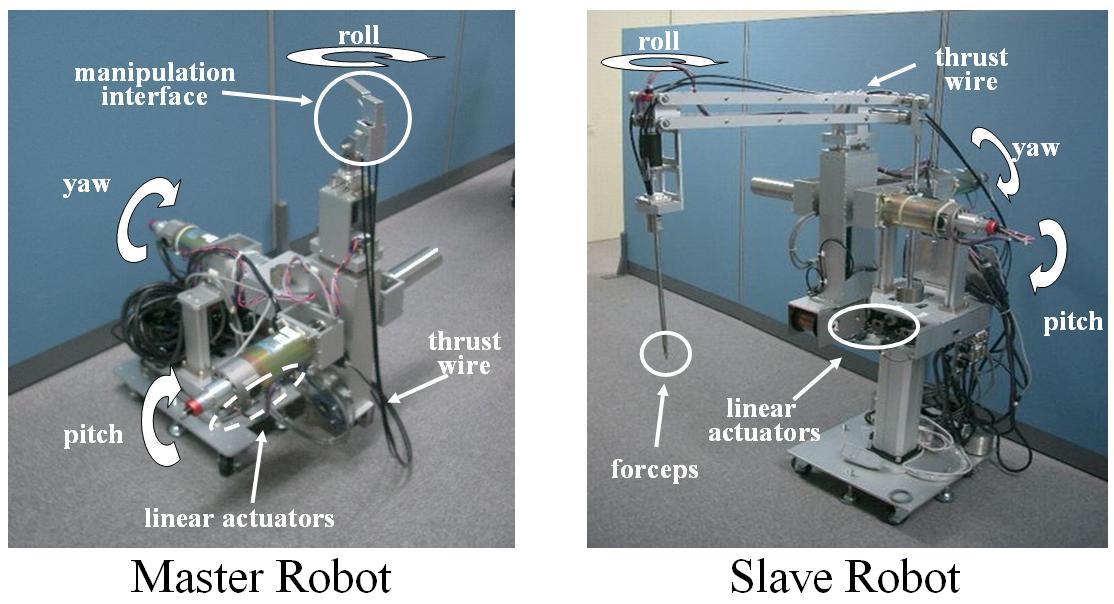
内視鏡手術ロボット
大西研究室では、こうした様々な自由度や特徴を持ったバイラテラルロボットを組み合わせ、将来は手術システムなどの構築も視野に、研究を行っています。
 —
—
 —
—